앞으로는 사람이 직접 선박을 타고 나가지 않아도 무인로봇이 해양 조사를 직접 수행하게 될지도 모른다. 지금도 로봇이 해양조사에 있어 한 몫을 차지하고 있는 것은 놀라운 일이 아니다.
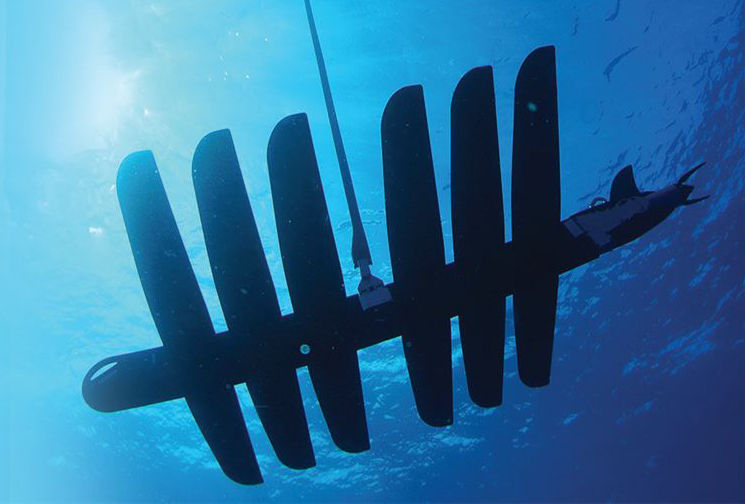
국립해양조사원(원장 직대 류재형)은 오는 8월 '무인해양로봇'인 수중무인탐사체(웨이브 글라이더, Wave Glider)를 이용하여 울릉도 해역의 해저지형 시범 조사에 들어간다.
참고) 웨이브 글라이더(Wave Glider) : 파랑 및 태양광 에너지를 동력원으로 이용하여 원격제어가 가능한 무인 자율운항 탐사장비
참고) 친환경 무인자율 탐사로 해양 파랑으로 부터 스스로 동력을 획득하는 친환경 시스템으로 추진력을 위한 전원 장치 교체 불필요 하며, 장시간 및 원거리 이동 가능하다. 또한 고정식 부이와 이동식 선박 장점 결합상태로 지정된 위치에서의 정점 관측과 실시간 이동 관측을 병행한다.

'무인해양로봇' 웨이브 글라이더는 파도에너지와 태양광만으로 동력을 확보하여 24시간 실시간 바다 상황을 전달할 수 있다. 뿐만 아니라, 원격으로 이동이나 복귀 등을 조종할 수 있다.
우리나라는 삼면이 바다로 둘러싸여 있어 관리 대상인 바다 면적이 넓은 편이며, 섬과 같은 거점이 없는 경우 상시 모니터링하기는 어렵다. 그러나 웨이브 글라이더 등 무인해양로봇이 보편화될 경우 바다를 모니터링하기가 보다 쉬워질 것으로 기대된다.
진준호 수로측량과장은 “우리 바다의 상황을 상시 모니터링할 수 있는 체계를 구축하는 것은 국가 해양력과도 직결된다.”라면서, “올해 성과를 기반으로 이러한 체계를 갖추고 무인해양조사, 자료 관리 표준화, 기술 융복합 등 해양조사기술 능력을 보다 더 향상시키기 위하여 최선을 다할 것”이라고 밝혔다.
무인해양로봇 '웨이브 글라이더(Wave Glider)' 제원
<제어> 실시간 제어(근거리:CDMA 통신 이용/원거리:위성통신 이용)로 양뱡향 통신 실현, 이동경로 및 현위치 모니터링, 센서 제어 및 관측자료 전송, 이동경로 지정 및 변경 등
- 태양열을 이용한 해양관측센서 운용(해저지형, 기상, 물리, 수중음향관측, 생물, 화학관측)
<사양>
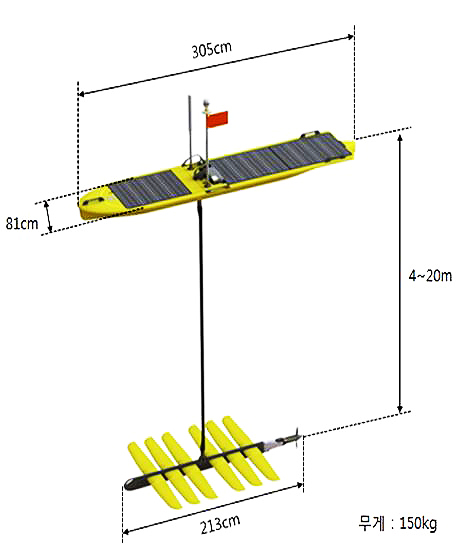
일반 - 장비의 구성 : Float과 Sub로 구성- 운용가능 유속 : 1.0 ~ 2.3노트
전원 - 이동추진력 : 파랑으로부터 획득 및 관측장비운용 : 태양열 (170W)획득
기본장착 장비 - AIS수신기, 기상관측 센서
<안전> - Radar 반사판, 위치표시등 및 깃발, - 위치발신장치(위성통신이용), - 위치발신장치(RF통신이용), - 자기상태확인 센서(기압,기온,누수확인)
<기타> - Heading, GPS외 관측, - 각종 관측장비 탑재 공간
Wave Glider 운용 사례
태평양 횡단(2011년 11월 샌프란시스코에서 2013년 2월 호주 도착)

멀티빔 음향측심기를 장착하여 해저지형을 조사한 결과

