KETI(전자부품연구원, 원장 박청원)는 자율주행자동차의 핵심인 스캐닝 라이다(LiDAR, Light Detection And Ranging)센서 광학엔진 플랫폼을 국내순수기술로 개발했다고 지난18일 밝혔다.
스캐닝 라이다(LiDAR)센서는 3차원 형상정보를 획득하는 센서로 주변차량과의 거리나 이동하는 물체의 인식이 가능해 자율주행차량의 ‘눈’ 역할을 하는 핵심부품이다. (Scanning LiDAR)
레이저를 이용한 측정기술로서 다수의 레이저를 조사하여 거리정보의 3차원 집합체를 만드는 기술로 현재는 벨로다인(美), 아베오(獨), ASC(美)가 각각 몸체회전형과 거울회전방식, 광학계 고정 방식으로 글로벌 시장을 주도하고 있다.
라이다센서 세계시장은 ‘15년 9억$에서 ’20년 33억$로 연평균 29%의 급성장중이며, 국내는 100%수입에 의존하고 있다.
이번에 개발된 스캐닝 라이다 광학엔진 플랫폼은 소형화에 유리한 거울회전방식으로써, 렌즈광학계의 통합설계를 통한 구조단순화, 광부품을 절반으로 줄인 저비용설계 및 이를 통한 생산공정 단축으로, 신뢰성은 높이고 생산단가는 낮췄다.
처음부터 상용화를 염두에 둔 설계다. 이번에 개발된 스캐닝 라이다는 기술적으로도 해외제품과 대등한 수준이다. 초당 30프레임의 속도로 200미터 거리의 모든 사물을 인식한다. 인식 오차는 10cm, 수평시야각은 140°다. 보통 사람의 시야각이 40km/h 주행 시 100°, 100km/h인 경우 40°인 것을 감안하면 충분히 안전성을 담보할 수 있는 수치다.
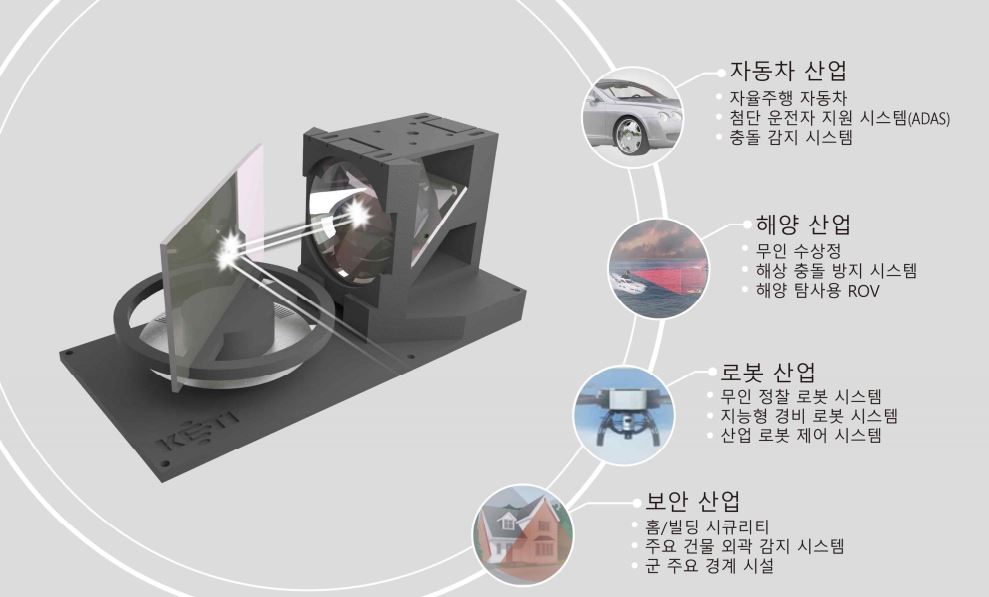
특히, 스캐닝 라이다 센서기술의 국산화는 자율주행차량 뿐만 아니라, 드론, 무인로봇, 무인수상정, 보안 등 다양한 분야 에 적용될 수 있기 때문에 의미가 크다.
최현용 KETI IT융합부품연구센터장은 ‘라이다센서는 광학엔진 기술과 독립플랫폼을 확보하는 것이 핵심’ 이라며 ‘금번 결과물은 다양한 자율주행 산업분야에 접목될 수 있을 것’이라 말했다.
연구결과는 자동차 전장부품회사인 ㈜카네비컴을 통해 내년부터 상용화될 계획이다. 정종택 ㈜카네비컴 대표는 ‘전자부품연구원이 개발한 광학엔진 플랫폼은 높은 신뢰성과 양산성으로 글로벌 경쟁력을 갖췄다’며 기술이전의 배경을 설명했다.
이 기술은 산업통상자원부와 한국산업기술평가관리원의 ‘첨단 센서산업 육성사업’으로 지원된 ‘자율주행자동차용 8채널 15f/s급 스캐닝 라이다 센서 ’ 과제로 개발되었다.
