NVIDIA의 딥러닝 플랫폼(임베디드 컴퓨터) 'Jetson TX1'기반 모니터링 시스템 탑재

파나소닉이 동력 보조 로봇의 실용화를 목적으로 지난 2003년 6월 사내 벤처 제도 '파나소닉스핀 업 펀드'로 설립된 액티브링크(대표 후지모토 히로미치)는 딥러닝(Deep Learning) 기반 모니터링 시스템을 탑재한 슈트로봇 '파워 로더 MS-04'의 프로토 타입을 지난 19일부터 21일까지 도쿄 빅 사이트에서 개최된 'Japan Robot Week 2016'에 선보였다.

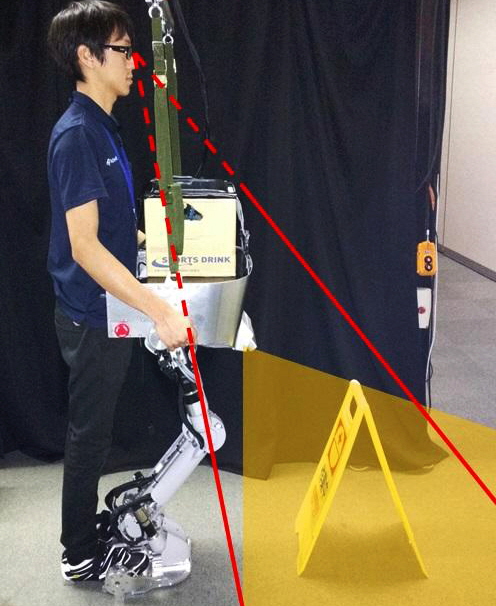
'파워 로더 MS-04'는 NVIDIA의 딥러닝 플랫폼(임베디드 컴퓨터) 'Jetson TX1'기반 모니터링 시스템으로 노면의 기복(起伏)과 장애물 등 주행로 상태를 사각 없이 파악할 수 있으며, 이족 보행 및 자유로운 운반이 가능하며, 사람이 평소 짐을 들어 안고 나르는 자세(아래 영상참조)에 가깝다.
참고) NVIDIA Jetson TX1는 객체 인식이나 정보의 해석을 학습할 수 있는 심층 신경망 컴퓨터 소프트웨어로 설계된 세계 첫 번째 임베디드 컴퓨터이다. 이 새로운 접근은 학습하는 기계와 이미지 인식, 대화 처리 등 자율적인 디바이스에게 획기적인 도약을 준 기술이다.

한편, 액티브링크는 동력 보조 로봇 영역의 연구에 기여하도록 "파워 로더 MS-04"의 기술 정보를 요청하는 대학이나 연구 기관에 제공한다고 한다. 인간과 기계의 복합적이고 다양한 연구에 그리고 새로운 기술과 장치의 구현과 실용화에 기여하고 그 성과를 보다 좋은 파워 로더의 실현에 연결해서 나가기를 바란다고 밝혔다.
Tag
#N
저작권자 © 세미나투데이 무단전재 및 재배포 금지
