적절한 악력으로 물건을 떨어트리지도 않고 또 손상시키지도 않는 로봇을 어떻게 만들어낼까? 연구가들의 수년에 걸친 고민을 해결하는데 도움이 될 만한 센서 장갑이 개발돼 주목을 끌고 있다.
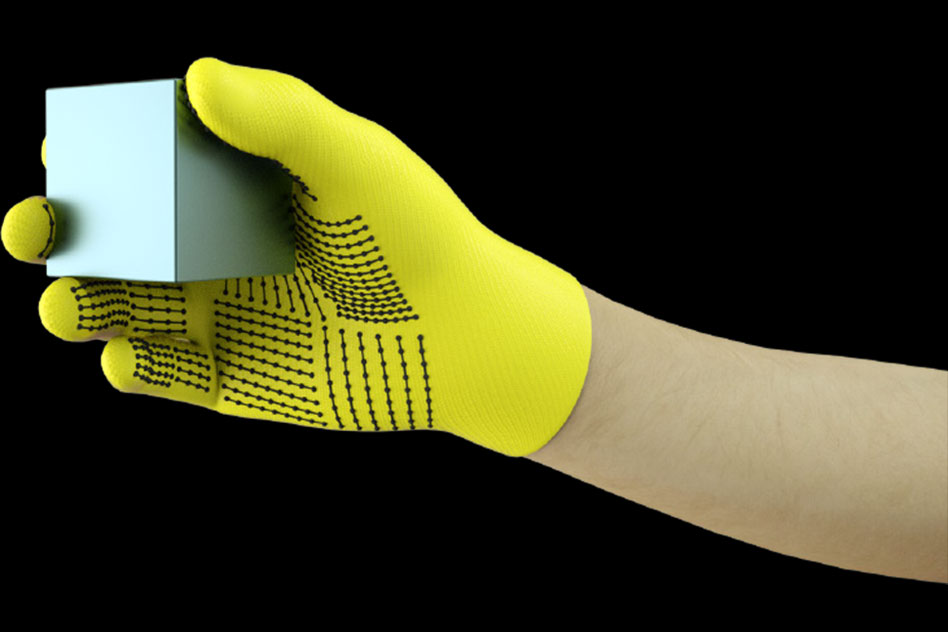
MIT 연구팀이 사람 손으로 사물을 잡을 때 나오는 압력을 감지하는 센서 약 550개가 손바닥 전체에 부착된 저가의 니트 장갑 ‘스케러블 택타일 글러브(scalable tactile glove, 이하 STAG)’를 개발했다고 30일(현지시각) 발표했다. 그 연구 성과는 ‘네이처’에 게재됐다.
장갑의 각 센서는 인간이 다양한 방식으로 물체와 상호 작용할 때 압력 신호를 포착한다. 신경망은 그 신호를 처리하여 특정 물체와 관련된 압력 신호 패턴의 데이터 세트를 학습한다.
연구원들은 STAG를 사용하여 탄산음료, 가위, 가위, 테니스 공, 숟가락, 펜, 머그잔 등 26 가지 공통 객체에 대해 AI 시스템이 접촉만으로 물체를 인식 할 수 있게 하는 방대한 데이터 세트를 작성하고 이 데이터 세트를 사용하여 시스템은 객체의 신원을 최대 76 %의 정확도로 예측했으며, 시스템은 약 60 그램 내에서 대부분의 물체의 정확한 무게를 예측할 수 있다고 밝혔다.
또한 이 정보는 로봇이 물체를 식별하고 조작하는 데 도움이 될 수 있으며 보철 디자인을 도울 수 있으며, 실험을 통해, 손의 여러 부위가 어떻게 연동해 작동하는지도 확인했다. 예를 들어, 누군가가 검지 가운데 관절을 사용할 경우 엄지는 거의 사용하지 않는 점이다. 이 같은 정보는 로봇이 물건을 다룰 때 크게 도움이 될 것으로 보인다.
사실 접촉을 통해 압력 데이터를 수집하는 장갑은 STAG가 처음은 아니다. 대부분의 경우는 비용이 수천 달러에 달하고 센서 개수가 50개 정도에 불과하다. STAG는 매우 높은 해상도의 데이터를 생성하지만 시중에서 구할 수 있는 재료로 약 10 달러의 상업적으로 이용 가능한 자료로 만들어졌다.
