오늘날 지능적이고 적응력이 뛰어난 로봇을 보유하고 있음에도 불구하고, 사람의 손처럼 부드럽고 유연한 기능을 로봇에게 요구하는 것은 여전히 어렵다. 또 로봇 손은 미리 정의된 모양과 위치가 있는 구조화된 환경에서만 작동하는 경향이 있으며 일반적으로 다양한 형태의 불확실성에 대처할 수는 매우 어렵다.
그러나 최근 몇 년 동안 로봇 공학자들은 고무와 같은 부드럽고 유연한 재료로 손가락을 만들어 이 문제를 해결하기도 했지만 여전히 크거나 무거운 물건을 다룰 수는 없다. 우리가 로봇에게 더 많은 작업을 맡기길 원한다면, 우리는 로봇에게 좀 더 다재다능한 기능을 제공해야 한다.

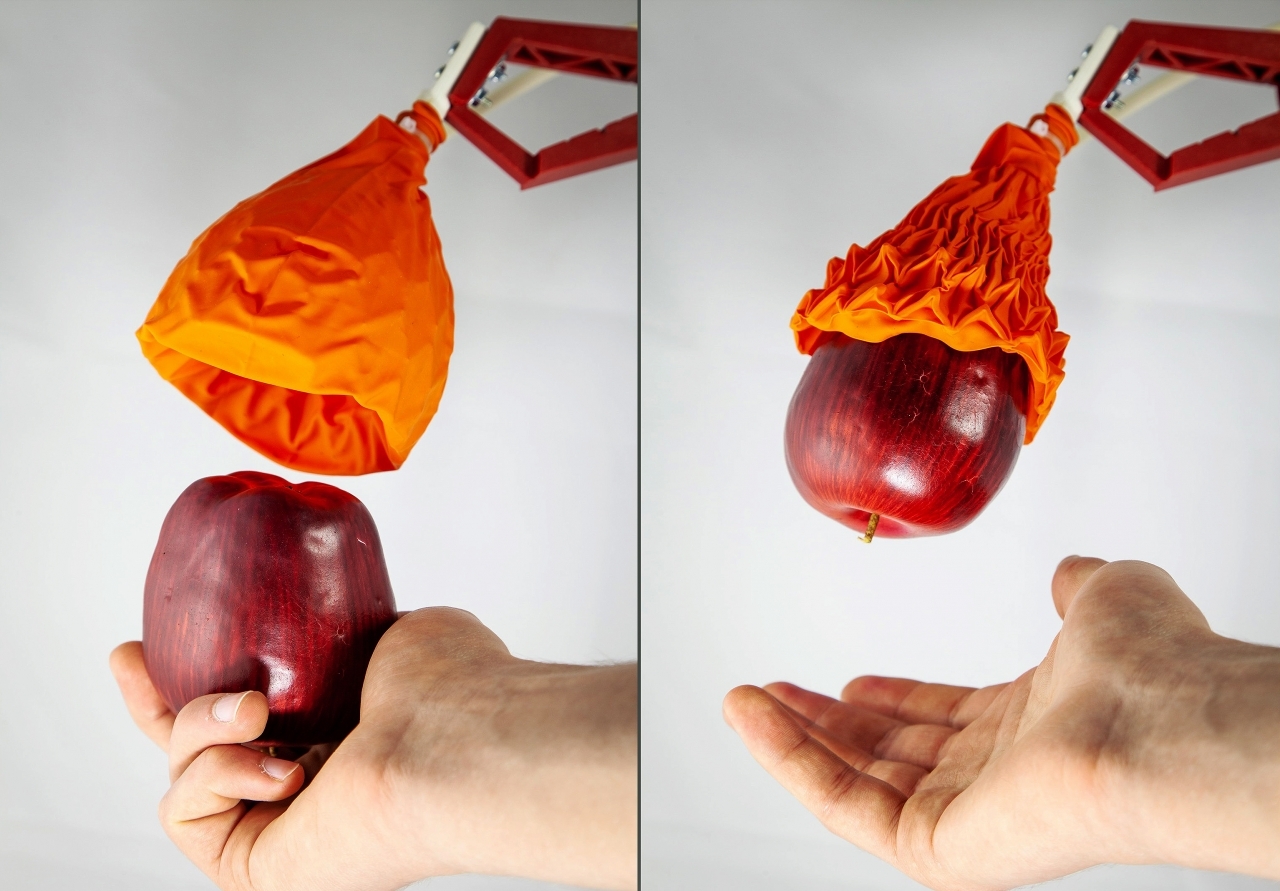
MIT(Massachusetts Institute of Technology)와 하버드 대학 (Harvard University)의 연구팀이 강하고 부드러운 로봇 공학의 새로운 시대를 여는 로봇 손을 개발했다고 15일(현지시각) 발표했다. 이 로봇 손은 원뿔 모양의 종이 접기 마술 공에서 영감을 얻었으며, 어떤 종류의 손가락 모양의 그리퍼를 사용하는 대신, 원뿔 모양의 로봇 손이 물체를 감싸잡는다.
또한 지난 14일(현지시각) MIT 인공지능연구소(CSAIL)에서 공개한 영상에서는 로봇 손은 자신의 무게의 100 배에 달하는 물건을 집어들 수 있다. 또 이 동작을 통해 수프 캔, 망치, 와인 잔, 드론 및 심지어 브로콜리와 작은 꽃 등과 같은 더 넓은 범위의 물체를 잡을 수 있으며, 로봇 핸드는 지름의 70 %를 잡아 들어 올릴 수 있었기 때문에 손상을 입히지 않고 다양한 종류의 사물을 들어 올릴 수 있다.
한편 연구팀의 이번 '로봇 손' 연구 및 개발 내용은 오는 5월 캐나다 몬트리올에서 개최되는 로봇 및 자동화에 관한 국제회의(International Conference on Roboticsand Automation)에서 발표될 예정이다.
